



Piezo Accelerometer Tutorial
Accelerometer Properties
Basic considerations
When measuring vibrations in general, we can distinguish between two fundamentally different types, namely relative and absolute vibration measurement.
Relative vibration would be the measurement of a variable distance, for example the gap between a rotating shaft and a bearing. It can be measured by a proximity sensor installed on the bearing which is pointing at the shaft. This provides the motion of the shaft relative to the bearing.
An accelerometer is an inertial sensor and measures absolute vibration. The accelerometer measures vibration in space and not with respect to some other system. The inertial mass provides this characteristic because it is "suspended" by the sensing element in the sensor. The acceleration acts on the inertial mass and generates a force which is measured by the sensing element. However the piezo sensing element is not completely rigid and therefore it allows for a tiny movement of the inertial mass. We will see in this chapter that this movement of the inertial mass is strongly dependent from the vibration frequency and leads to a most important frequency-related dynamic behavior.
The Natural Frequency
We retain:
-
The measuring element of an accelerometer can be regarded as a spring. The accelerometer therefore behaves like a spring-mass oscillator.
-
The frequency behaviour of an accelerometer is characterised by its natural frequency.
-
Increasing the inertial mass leads to a lower natural frequency while increasing the stiffness of the suspension (spring) will increase it.
The Natural Frequency / Resonance of the Accelerometer
For piezoelectric accelerometers, the natural frequency is also referred to as resonance frequency which is simply defined as the maximum of the amplitude response to a constant input signal with varying frequency.
Contributing design elements
We have seen that the natural frequency or resonance depends on the inertial mass m and the stiffness of the spring i.e. the so called spring constant.
In a piezoelectric accelerometer, the "spring" is made up by the stack of piezoelectric elements.
The spring constant of the different parts of the sensor element is determined by the dimensions (surface area A and individual thickness ti ) as well as the stiffness of the material. All parts together result in the total spring constant.

It is obvious that the more elements are placed on top of each other, the lower the stiffness of the stack.Thus, for high stiffness, we prefer the smallest number of elements with a large surface area and small thickness. Besides the number of parts there are also the interfaces between them that reduce the stiffness. Therefore, attention must be paid to the flatness and surface quality of all parts.
Mounted vs. Non-Mounted Resonance
In our theoretical model we have assumed that the base is fixed. In the real world this is approximately the case when the sensor is mounted on a heavy and rigid body.
When the sensor is not mounted, the base is also able to oscillate and the resonance of the free, non-mounted sensor is therefore considerably higher than when it is mounted.
When we talk about the capability of an accelerometer to work at high frequencies we need to look at the mounted condition.
The non-mounted value of the resonance can be used to check the conformity of a set of sensors, e.g. in a quality control.
Measurement of the Resonance
The resonance frequency of a piezoelectric accelerometer can be excited by a short mechanical impulse. For the measurement in the mounted state, we need a block with minimum ten times the weight of the sensor. It is recommended to use a cube made of Tungsten.
The following methods can be used to measure the mounted or non-mounted natural frequency.
A mechanical shock can be applied, for example, by a small metal ball attached to a thread. When striking with the suspended ball, make sure that it does not hit twice.

Steel ball Impact
The Hsu-Nielsen test method is another possibility. This is a simple method in which a wide frequency range excitation signal is generated by breaking a pencil lead. Originally developed for testing acoustic emission sensors, the method is also excellent for testing the natural frequency of an accelerometer.

Hsu Nielsen source test method
After such an impact the inertial mass will be «ringing» at the resonance and with a signal analizer or transient recorder we can read out the frequency.
We have to take into account that sometimes we are not only exciting the natural frequency of the sensing element, but also many resonance frequencies within the sensor. This means that we usually need a critical interpretation of the measurement result.
There is also a completely different method that uses the inverse piezoelectric effect to excite the resonant frequency, by injecting an electrical signal. As injection signal a single pulse or a alternatively a white noise is chosen.
By calculating the FFT transfer function the resonant frequency can be determined.

Signal injection test method
Accelerometer Frequency Response
One of the most important characteristics of a piezoelectric accelerometer is its frequency response. The frequency response is the output signal of the transducer when exposed to different frequencies of vibration. The lower end and the upper end of the frequency response are characterised by two different phenomena. First, let's look at the upper end.
en construction ...
Frequency Response
We retain that
Frequency response in the upper range
The frequency response of an accelerometer is essentially dependent on the resonance of the sensor.
The resonance frequency as such depends on the construction of the sensor, but the shape of the frequency response curve is usually very close to a typical characteristic curve.
The figure shows the typical frequency response of a piezoelectric accelerometer. Both axes are shown in a logarithmic scale.
In the frequency axis, we use the relative frequency f/fres . This means it is given in fractions of the resonance frequency. For example, the value f/fres = 0.2 means that the frequency is 20 % of the resonance frequency.
On the vertical axis, the frequency response is also plotted in relative units. One refers to the value of the output signal at the calibration frequency of the accelerometer at 120 Hz or 100 Hz. Thus, the gain at the calibration frequency is set equal to 1.
The resonance stands out clearly. The amplification of the signal at the resonance is called the Q-factor. There are typical Q-factors of about 50 or even 100

Typical accelerometer frequency response
As a rule of thumb, the response curve stays within 5% up to about 1/5 of the resonant frequency and the +3dB point is at about half the resonance frequency.
Frequency response in the lower range
Towards the lower frequencies, the correct reproduction of the acceleration signal is limited by the fact that the charge built up in the piezo element decays according to the internal resistance, which therefore should always be as big as possible.
By using a charge amplifier, the abilty to measure low frequencies can be increased considerably when we choose the right high-pass filter at the amplifier. The low end frequency response is then imposed by the charge converter, supposing the internal resistance of the piezo element has also a certain minimal value.
Design and other important Elements
Similar to the dynamic range of an accelerometer we find for the frequency response that the high end is rather defined trough the mechanical sensor design while the low end is rather given by the following electronics.
The frequency response at higher frequencies is determined by the resonance, so we have to consider the same points as for the natural frequency. Furthermore, it must be taken into account that the mass of the whole accelerometer can influence the frequency behaviour of the measured object. This means the sensor with the lowest mass will normally be the best to measure high frequencies.
In addition to the sensor mass, the mounting surface of the accelerometer and the contact surface to the measured object are of particular importance.
Measurement of the Frequency Response and Resonance
For measuring the frequency response, we basically use the same setup as for the calibration. I.e. a back-to-back mounting with a central block on which we mount the unit under test on one side and a reference transducer on the other side. Of course, the frequency response of the reference transducer also plays a role. Ideally, it should have a resonance that is about 10 times higher than the highest frequency to be measured. If this is not the case, the excitation amplitude must be adjusted accordingly. With a Laser reference this problem does not exist.
In addition, utmost attention must be paid to the surfaces of the central block. The flatness and roughness of these surfaces have a great influence on the resonance frequency. For very high frequencies, a thin oil film should be applied.
Unit under test (UUT)
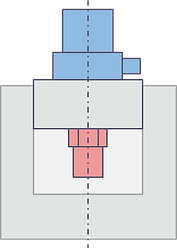
Reference
Accelerometer
Set-up for the frequency response measurement
To carry out a frequency response test we either set the drive signal to different fixed frequencies and read the signal of the UUT or we sweep the frequency of the drive signal slowly from the lowest to the highest frequency of interest.
By increasing the frequency until we reach the maximum output signal of the UUT, we measure the resonance. If we are interested in the Q-factor, care must be taken that the the excitation really hits the resonance peak and that it remains long enough for the signal to rise to the actual maximum.
Influence of the surface / coupling condition
The graph shows a series of real measurements of the resonance frequency of the same sensor mounted on a block with different surface finishes from ISO N3 (lapped) to N6 (ground). The resonance varies from 37.7 kHz down to 27.2 kHz for the dry mounted condition, which corresponds to a loss of 27 %!
With an oil film applied, the result is much better, but the influence of the surface is still visible.

Measured values of the accelerometer resonance with different surface qualities and coupling conditions